
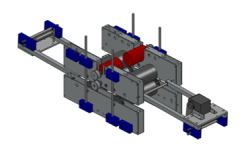
交差・対面組換型
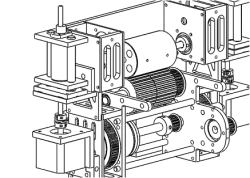
押付力調整型

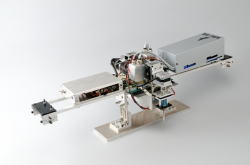
連結型
神奈川大学工学部 精密機械学科 江上研究室では、2008年に宇宙エレベーターのクライマー開発を開始しました。エドワーズ博士の構想では、クライマーはローラー(車輪)でテザー(ケーブル)を挟み、電気でローラーを駆動させて昇降することになっています。まずは、テザーを一体どのように掴んで移動するのか、というごく基本的な点からの検証をスタート。ローラーの配置ひとつとっても、二つのローラーが向かい合う対面型、二つのローラーの位置をずらし、テザーに接触する面積が大きい交差型といくつかの方式があります。ローラー位置を組み替えてテストできる交差・対面組換型機体の開発が、当初の課題でした。
ローラーがテザーを挟むということは、テザー上にクライマーが留まっていることができるのは、摩擦の力によるということになります。摩擦係数は地上付近では、雨などの天候により変化があります。また、宇宙エレベーターのテザーの構造は10万km常に一定ではなく、静止軌道付近で太くなる”テーパー”状であることが想定されています。こうした変化に対応する柔軟さを持たせるために、テザーの変化に応じてローラーをテザーに押し付ける力を変化させられる、自動調整機構を持った押付力調整型機体の開発が課題となりました。
こうして、「宇宙エレベーターとはどのような構造物か」→「クライマーとはどうあるべきか」を繰り返し検証していくことによって、ひな型クライマーの設計思想が固まっていきます。これまで、宇宙へ人や物資を運ぶ宇宙輸送がクライマーの役割とされていました。鉄道のように車両を連結して物資輸送の量・サイズを組み替えられるようにする、移動速度を向上させ、宇宙エレベーター上での移動時間を短縮する、といった検討課題が次々と出され、対応するひな型クライマーの開発が行われています。
