機体が巧く昇降できない理由は沢山あります。それらの原因を探り、改善することは技術開発の第一歩です。自動車や飛行機から小さな家電品に至まで設計・試作・試運転・改善を繰り返しながら、購入者が満足できる優れた製品が開発されています。
今回のSPIDER実験機体も昇降できない場合の例を考えてみると、ダンパー等での締め付け力不足、モーターのトルク不足(ギア比)、タイヤの調整不良、バッテリーの問題などが一番多く考えられます。 例えば、タイヤは空転するが昇らない場合は締め付け力が不足しています。少しは昇が直ぐに止まる場合は、モーターのトルク不足かバッテリーの問題が考えられます。上昇はするが10m~20m程度で止まる場合は、モーターに負荷が掛かり過ぎてバッテリーの消耗が激しいことが考えられますので、タイヤの位置やギア比、バッテリー容量(7.2Vは一定)を検討する必要があります。
|
 |
 |
 |
しかし、これ以外にも考えられますので、各部分を仲間と一緒に観察し、部分変更して、その変化を確認することが重要です。解らないことがあったらWebで調べてみましょう。
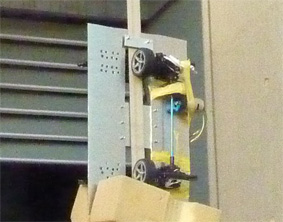
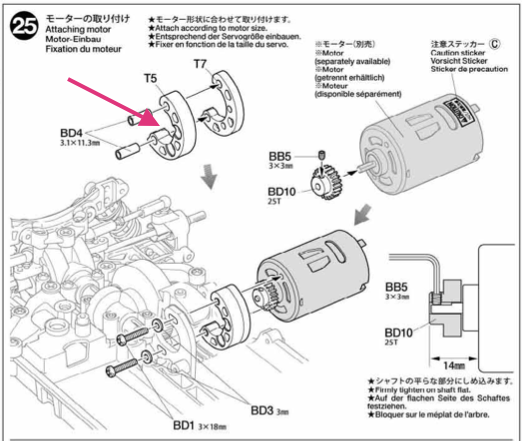
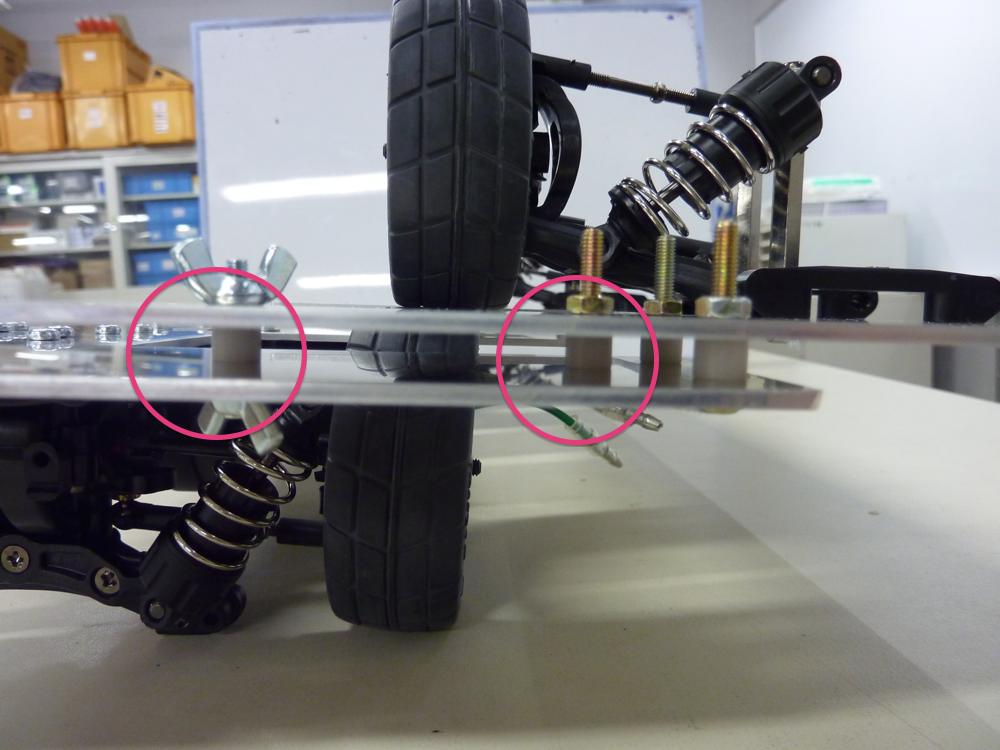
下の例はモーター取り付け位置とピニオンギアの例です。左の写真はモーター取り付け位置が悪く、ピニオンギアが右側のプラスチックスペンサー(T5とT7)を削っている状態でモーターに大きな負荷を与えています。この状態ではタイヤを手で軽く回せないと思います。また、スーパーギアとの間が空き過ぎているので歯を欠いてしまいます。
|
 |
 |
 |
| これは悪い例です。モーターの取り付け位置が不良です。
|
赤矢印の部分が削れています。 |
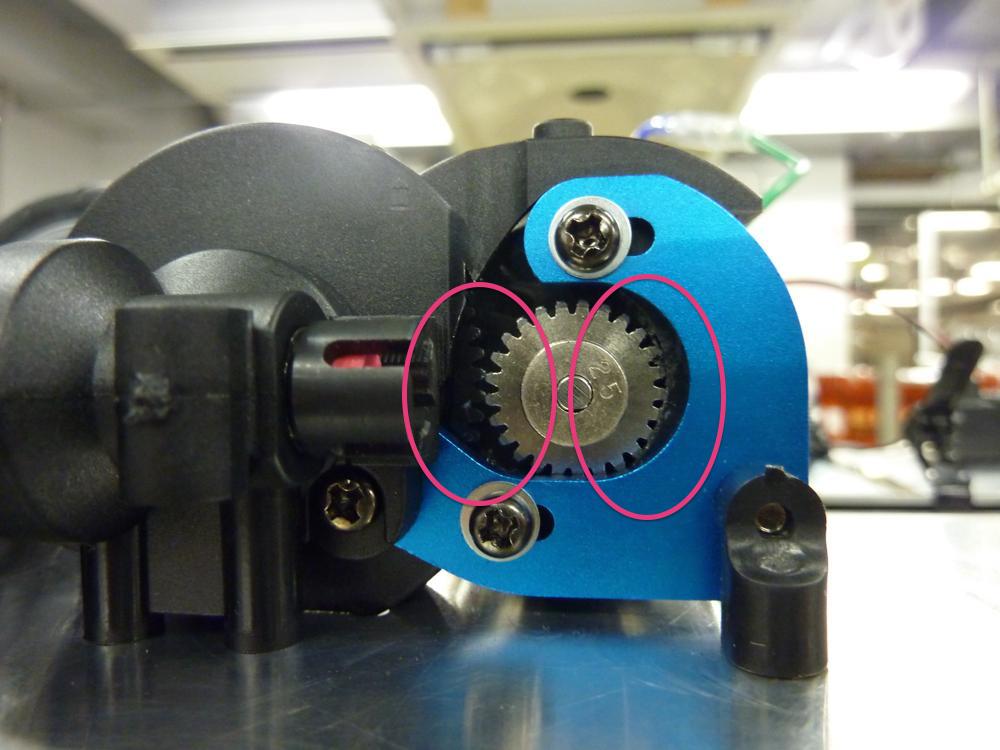
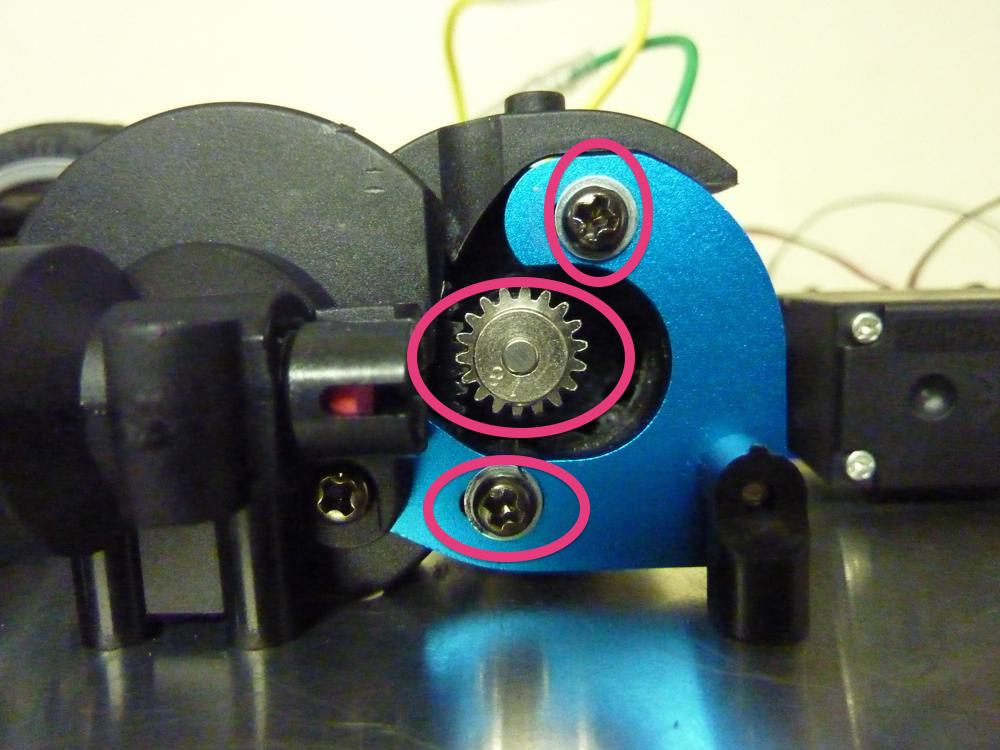
T18のピニオンギアに変更した後ですが、上下の2つのネジでモーターの位置を適切にセットします。 |
モーターのトルク不足を補う為には、小さいピニオンギアを装着すると良いです。スーパーギアとの比率が重要ですが、詳細はタミヤのサイトを見て下さい。(タミヤRCスタートガイド)
また、ギアだけではなくシム調整と言われる隙間の調整などをして、できるだけエネルギーのロスを無くします。また、ベルトテザーがアルミ板に接触している部分をできるだけ無くし、摩擦抵抗を減らします。これらは、バッテリーの消耗率に関係します。 |
 |
 |
 |
| ピニオンギアを左端のT19から順にT25まで並べてました。大きさの違いが解ると思います。 |
市販のピニオンギアです。これは大きさが違う2個セットです。 |
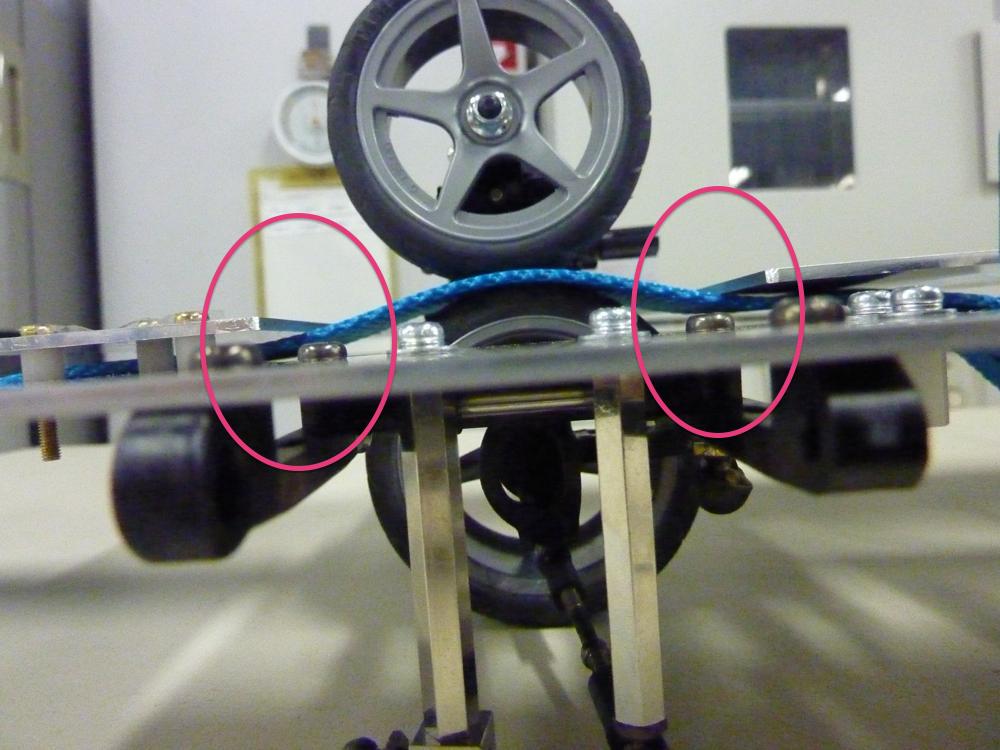
テザーがアルミ板に接触して摩擦抵抗が大きい例です。 |
機体の重心やタイヤの方向性も重要な要素です。ベルトテザーが通る機体の中心と重心が一致していないと、機体は斜め方向に昇ることになり、テザーがアルミ板の間を通過するときにガイドローラーを常に擦り続け負荷になります。バッテリーの装着位置などを工夫してバランスの良い機体に仕上げます。
|
 |
 |
 |
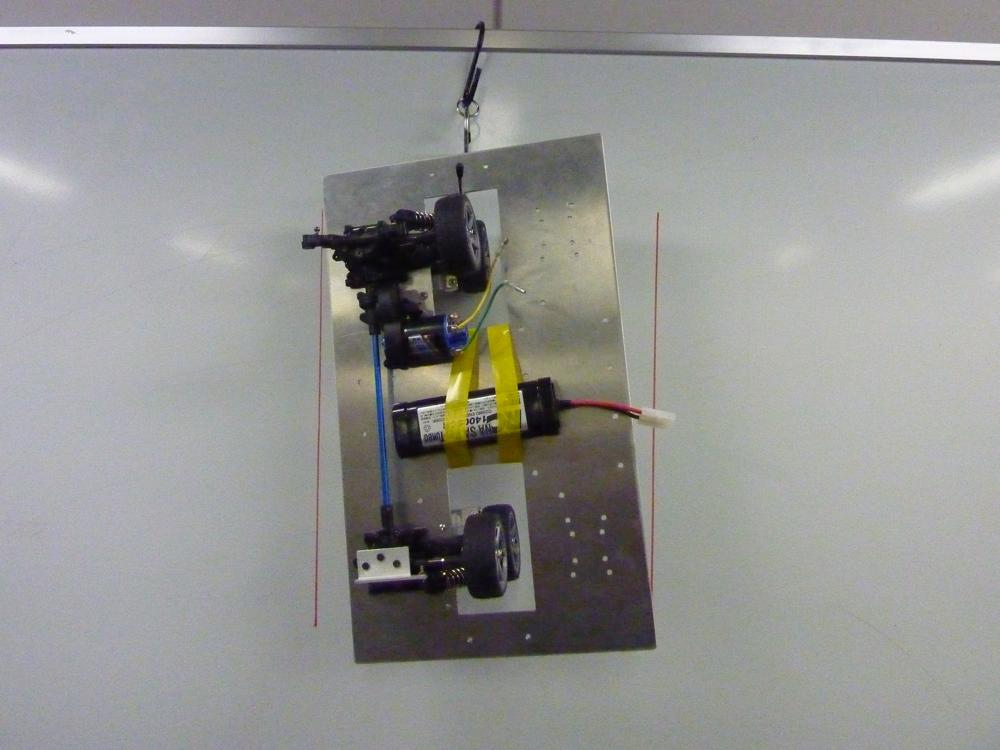
| バランスが悪く、中心で吊り下げると左に傾いてしまう機体です。 |
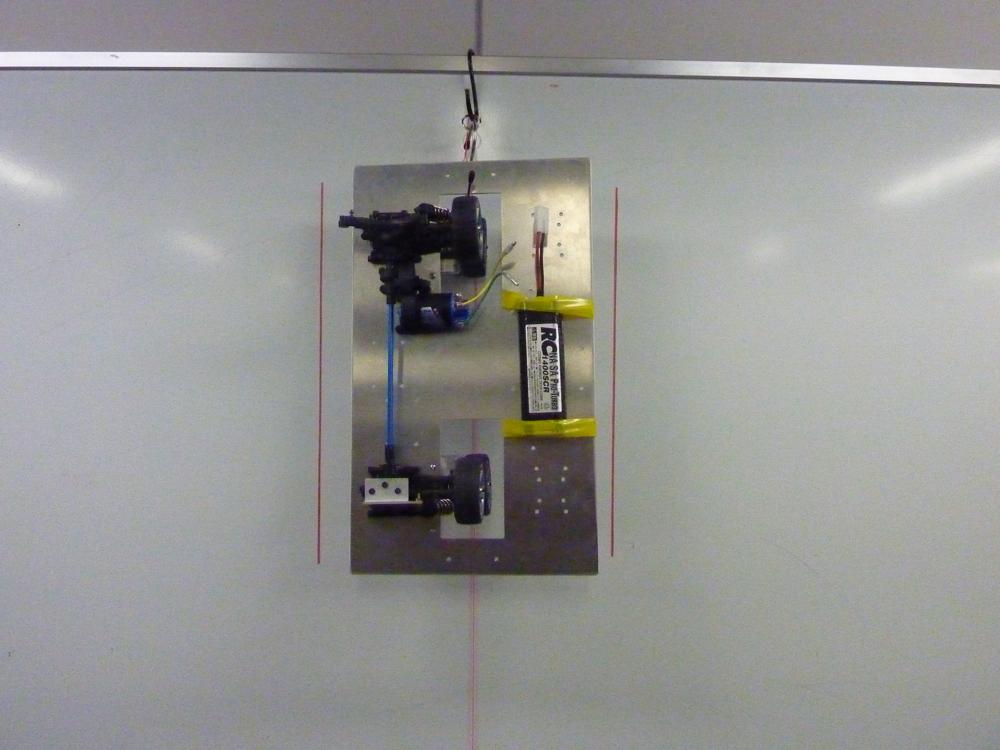
バッテリーの位置でバランスを調整しました。 |
白いプラスチック製のガイドローラーをテザーが擦り続けると負荷になります。 |
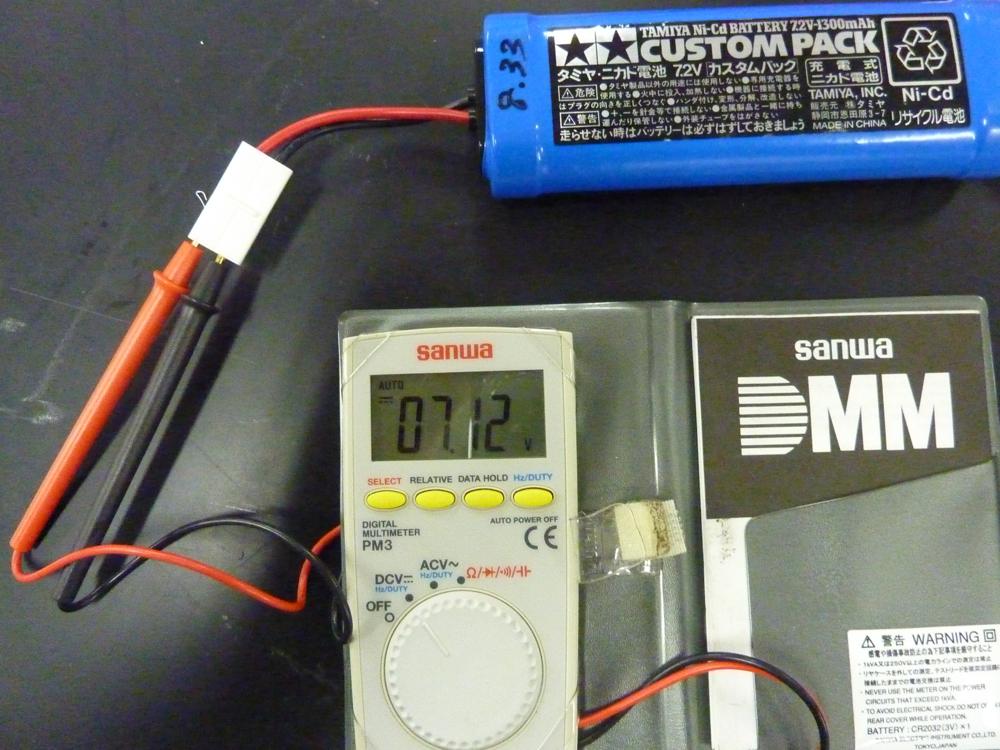
バッテリーも重要なパーツです。通常、充電満了になると7.2Vの製品でも8.4V程度の電圧があります。パワーが無くなり、機体が上がらない状態になると、電圧が7.2V以下になります。 なお、電流容量の大きなバッテリー(例えば3000mAh)なら長持ちしますので、機体の稼動時間も長くなります。しかし、モーターに対する負荷を充分減らす様な調整を行なえば、NiCdの1300mAhのバッテリーでも充分昇降ができます。
|
 |
 |
 |
| 充電直後のNiCdの1300mAhのバッテリー(8.38V) |
充電直後のNiMHの3000mAhのバッテリー(8.35V) |
使用後のNiCdの1300mAhのバッテリー(7.12V) |