NBH-1
機体特徴
NBH-1はSPEC×ROC2019のロボット競技部門に向けて開発された降下型無人汎用運搬車です。
JSEA主催宇宙エレベーター&ロボティクスチャレンジのSPEC×ROCは従来までクライマー競技部門のみのSPECでしたが、2019年から新たに地上作業ロボット競技部門であるROCが新設され、SPEC×ROCとして複合競技会となりました。
プロジェクトとして初めて開発した地上ロボットがNBH-1であり、汎用的な物資運搬用途を目的として設計されました。
以下は運用動画となります。
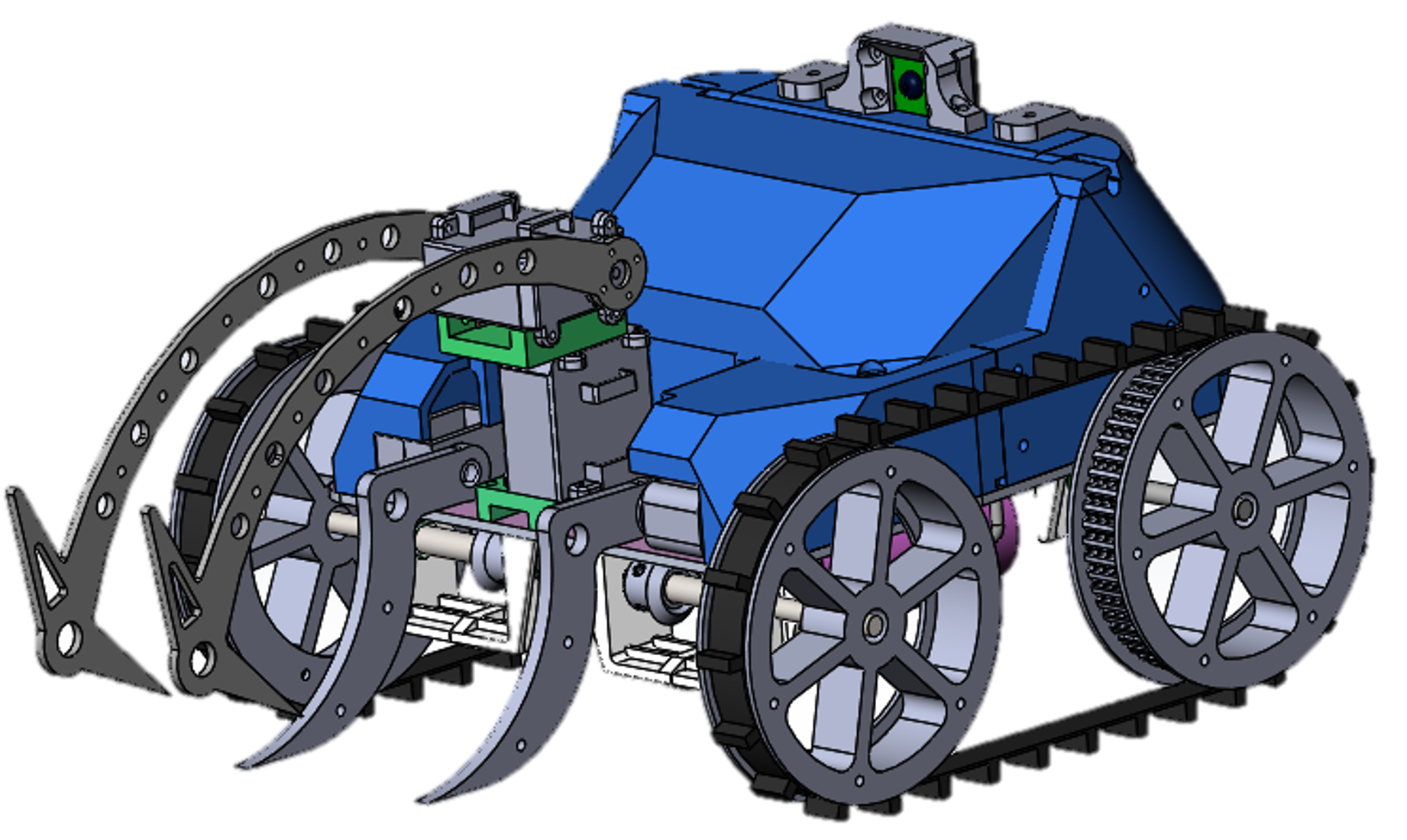
NBH-1は主に3つのユニットからなる複合システムです。最も重要な部分が自走ロボットユニット、そして地上落着時の衝撃を吸収するためのエアバッグユニット、最後にKUSEP-510などのSPEC級クライマーに積載するための積載装置です。
NBH-1はまず上空まで上昇したクライマーから切り離され、エアバッグユニットに搭載されたパラシュートにより減速しながら自由降下します。地上に落着時にはエアバッグユニットが作動し機体への衝撃を吸収します。落着した機体は傾いており、ロボットユニットは前面に搭載されたアームにより自ら体制を整え正常な姿勢へと移行し、ミッションを開始します。
ミッション時には前面に搭載されたアームにより資材等を掴み、そのまま走行することで目的地まで資材を運搬します。
ミッションは火星などの未整備の土地を想定しており悪路を走破する性能が求められます。そのためにNBH-1では大型の履帯を装備することで高い走破性を実現しました。
さらにネットワーク面では制御用マイコンであるRaspberry Piと接続された小型カメラを使用することで映像データのリアルタイムの取得が可能となっています。これに指向性wifiを組み合わせることで同一ネットワーク内においてwebRTC技術を介してリアルタイムで映像を確認出来ます。
機体仕様
| 寸法 | 50mm × 23mm × 31mm (38mm × 23mm × 16mm : ロボットのみ) |
| 重量 | 7.7 kg (4.5 kg : ロボットのみ) |
| 駆動モーター | DCモーター ×2 |
| サーボモータ | 上空射出用① 地上射出用② 上アーム用③④ 下アーム用⑤ |
| バッテリー | Ni-Cd 7.2V |
| 遠隔カメラシステム | web RTC |
| PC | Raspberry Pi 3 B+ |
| カメラ | Raspberry Pi Camera V2 |
| モバイルwifi | A-term |
| 指向性MIMOアンテナ | TP-Link outdoor CPE 510 |
<前のページに戻る