SPEC×ROC 2022
SPEC×ROC 2022に今年も参加しました
一般社団法人宇宙エレベーター協会が主催するSPEC×ROC。宇宙エレベーターの技術向上や関連するロボットなどの開発を目的に開催されたこの大会に私たち神奈川大学宇宙エレベータープロジェクトも参加しました。
今回の会場はなんと新潟!新潟工科大学さんのグラウンドにて製作したクライマーの昇降や、降下ロボットの地上への降下などの競技を行いました。 当日は競技だけでなく、宇宙食の講演や、宇宙エレベーターロボットの製作体験など関連イベントも多数開催され、家族連れの方など多くの人で賑わいました。
本記事では、今回出場したクライマー達の特徴や当日の様子について紹介しています。是非最後までご覧ください。

5S
kusep-5S は SPEC x ROC 2022 においてスピード賞の獲得を目指し、出場した機体です。このクライマーは加速性能が高すぎるゆえに、アクセル操作がとても難しく、少しでも 操作を誤ると駆動力を失い、スリップ(空転)してしまうという危険性があります。なので、高度な操作が求められる難しい機体です。
1 日目の昇降競技に挑戦しましたが、上昇時にスリップしてしまいクライマー残念ながら本来の速度を出すことができませんで した。さらにスリップによる摩擦でタイヤが溶けてしまい、昇降もできないような状況にな ってしまいました。ですが、至急、修復・調整を行い、昇降できる状態にまで戻すことがで きました。
そして、2 日目の昇降競技に挑戦をしました。2 日目も始めは本来の速度を出す ことができなかったですが、最後の昇降競技において 72.5km/h を記録し、「スピード部門 本髙砂屋賞」を獲得することができました。
M1
M1は最速クライマーをコンセプトに製作を行った機体です。 最速を目指すにあたり問題となるのが、パワーの問題です。 速度を上げようとするとパワーが足りなくなり、クライマーが上昇しないということが起きます。
そこで一番パワーを必要とする始動時の上昇をサポートするカタパルトクライマーと,そのサポートを受け最速で上昇するスピードクライマーの2機で1つのクライマーを制作しました。
クライマー同士の連結方法や機体の重量制限を超えないような軽量化,また2機の動作の連動がとても大変なポイントです。 今回の競技会では準備不足により昇降が叶わなかったものの、次回のSPEC×ROCでの活躍が楽しみな機体でもあります。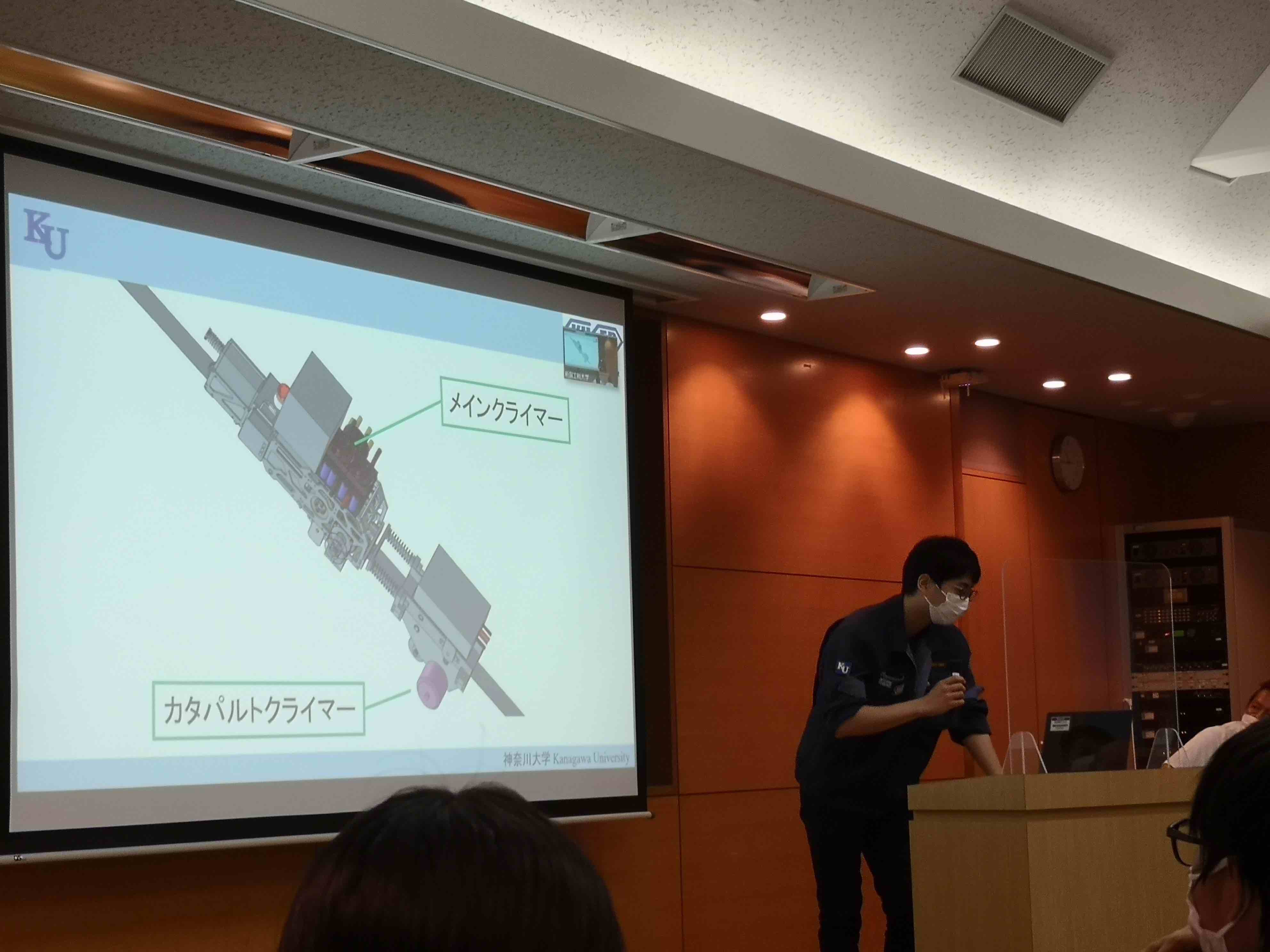
511
511はロボットを搭載して、今までより速く上昇させることを目標に製作した機体です。特徴としては、Wi-Fiを使用してスマホやPCと接続し、専用のアプリなどを入れることなく簡単に 操作できるようになっています。また、ハードウェアでは耐久性を向上させるために動力伝達の一部にギアを使用しました。
クライマーが完成して SPECxROC 直前の昇降実験では問題なく動作したように思われました。しかし、ペイロード(重り)を載せて実験していなかったため、実際に会場でペイロードとなるロボットを載せて昇降させたところ、クライマーの一部が破損し失敗してしまいました。
今回の大会では残念ながら昇降出来ませんでしたが、次回の大会での活躍に是非ご注目ください。

最後に
今回は宇宙エレベーター界隈を盛り上げるためにも、私たちプロジェクトが自らの成果を確認するためにもとても重要な意味を持つ大会でした。 途中トラブルに見舞われながらも、最終的には5Sがスピード賞を受賞するなどし大変喜ばしい結果になりました。
また、様々なチームとの交流を通して宇宙エレベーター界隈の盛り上がりを感じるとともに、沢山の刺激をもらいました。まだまだ反省点は残るものの、 この刺激を無駄にしないよう、神奈川大学宇宙エレベータープロジェクト一同これからも頑張って参ります。
最後に今回のSPEC×ROCに協力してくださった皆様、本当にありがとうございました。皆様のご協力のおかげで無事に大会を終了することが出来ました。 重ねてお礼申し上げます。前のページに戻る